

CPU scheduling for real-time operating systems involves special issues. In general, we can distinguish between soft real-time systems and hard real-time systems. Soft real-time systems provide no guarantee as to when a critical real-time process will be scheduled. They guarantee only that the process will be given preference over noncritical processes. Hard real-time systems have stricter requirements. A task must be serviced by its deadline; service after the deadline has expired is the same as no service at all. In this section, we explore several issues related to process scheduling in both soft and hard real-time operating systems.
Minimizing Latency
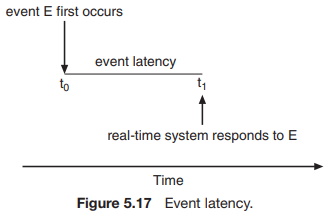
Consider the event-driven nature of a real-time system. The system is typically waiting for an event in real time to occur. Events may arise either in software - as when a timer expires - or in hardware - as when a remote-controlled vehicle detects that it is approaching an obstruction. When an event occurs, the system must respond to and service it as quickly as possible. We refer to event latency as the amount of time that elapses from when an event occurs to when it is serviced (Figure 5.17).
Usually, different events have different latency requirements. For example, the latency requirement for an antilock brake system might be 3 to 5 milliseconds. That is, from the time a wheel first detects that it is sliding, the system controlling the antilock brakes has 3 to 5 milliseconds to respond to and control the situation. Any response that takes longer might result in the automobile's veering out of control. In contrast, an embedded system controlling radar in an airliner might tolerate a latency period of several seconds.
Two types of latencies affect the performance of real-time systems:
1. Interrupt latency
2. Dispatch latency
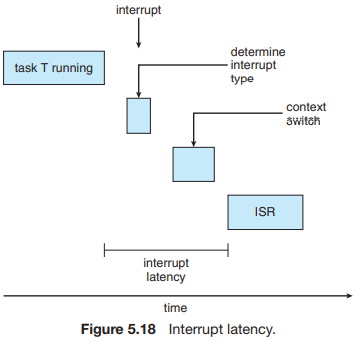
Interrupt latency refers to the period of time from the arrival of an interrupt at the CPU to the start of the routine that services the interrupt. When an interrupt occurs, the operating system must first complete the instruction it is executing and determine the type of interrupt that occurred. It must then save the state of the current process before servicing the interrupt using the specific interrupt service routine (ISR). The total time required to perform these tasks is the interrupt latency (Figure 5.18).
Obviously, it is crucial for real-time operating systems to minimize interrupt latency to ensure that real-time tasks receive immediate attention. Indeed, for hard real-time systems, interrupt latency must not simply be minimized, it must be bounded to meet the strict requirements of these systems.
One important factor contributing to interrupt latency is the amount of time interrupts may be disabled while kernel data structures are being updated. Real-time operating systems require that interrupts be disabled for only very short periods of time. The amount of time required for the scheduling dispatcher to stop one process and start another is known as dispatch latency. Providing real-time tasks with immediate access to the CPU mandates that real-time operating systems minimize this latency as well. The most effective technique for keeping dispatch latency low is to provide preemptive kernels. For hard real-time systems, dispatch latency is typically measured in several microseconds.
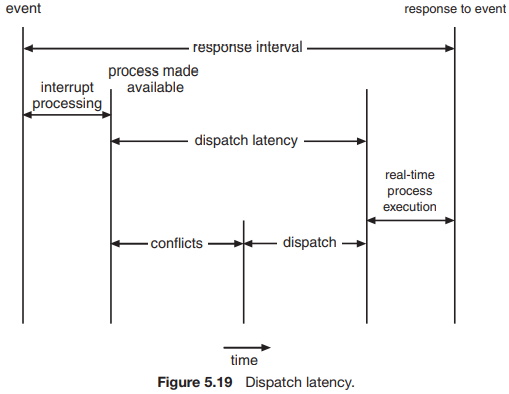
In Figure 5.19, we diagram the makeup of dispatch latency. The conflic phase of dispatch latency has two components:
1. Preemption of any process running in the kernel
2. Release by low-priority processes of resources needed by a high-priority process
Following the conflict phase, the dispatch phase schedules the high-priority process onto an available CPU.
About the Authors
Abraham Silberschatz is the Sidney J. Weinberg Professor of Computer Science at Yale University. Prior to joining Yale, he was the Vice President of the Information Sciences Research Center at Bell Laboratories. Prior to that, he held a chaired professorship in the Department of Computer Sciences at the University of Texas at Austin.
Professor Silberschatz is a Fellow of the Association of Computing Machinery (ACM), a Fellow of Institute of Electrical and Electronic Engineers (IEEE), a Fellow of the American Association for the Advancement of Science (AAAS), and a member of the Connecticut Academy of Science and Engineering.
Greg Gagne is chair of the Computer Science department at Westminster College in Salt Lake City where he has been teaching since 1990. In addition to teaching operating systems, he also teaches computer networks, parallel programming, and software engineering.

The tenth edition of
Operating System Concepts
has been revised to keep it fresh and up-to-date with contemporary examples of how operating
systems function, as well as enhanced interactive elements to improve learning and the student's
experience with the material. It combines instruction on concepts with real-world applications
so that students can understand the practical usage of the content. End-of-chapter problems,
exercises, review questions, and programming exercises help to further reinforce important
concepts. New interactive self-assessment problems are provided throughout the text to help
students monitor their level of understanding and progress. A Linux virtual machine (including
C and Java source code and development tools) allows students to complete programming exercises
that help them engage further with the material.
A reader in the U.S. says, "This is what computer-related books should be like. It is thorough, in depth, information packed, authoritative, and exhaustive. You cannot get this kind of excellent information from the Internet - or many other computer books these days. It's a shame that quality computer books are declining so rapidly in number. I hope they continue to update and publish this book for many years to come.

More Computer Architecture Articles:
• The AMD Athlon 64 Processor
• Basic Electronics for Computer Architecture
• Operating System Memory Paging Hardware Support
• The Computer's Chipset
• The Fetch, Decode, Execute Cycle
• AMD's Phenom Processor
• First-Come, First-Served CPU Scheduling Algorithm
• AMD's Phenom II Processor
• Introduction to the Raspberry Pi
• The Evolution of Hard Disk Bit Recording